Open Source Products and Case Studies
The following are the products and projects in which nn4mc has been used and built!
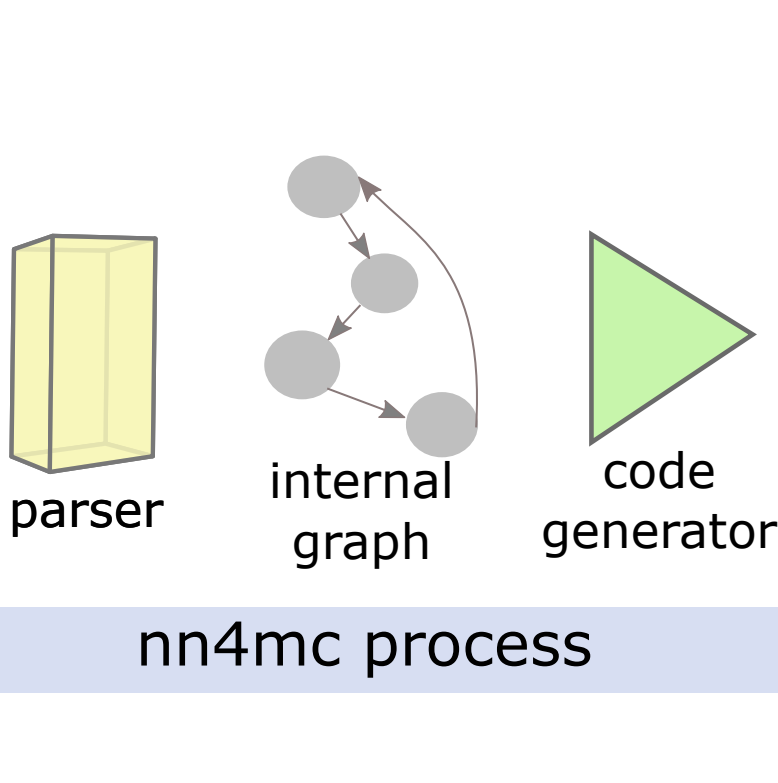
nn4mc_cpp
C++ command line tool
nn4mc_py
Python library
nn4mc_web
Web-based compiler
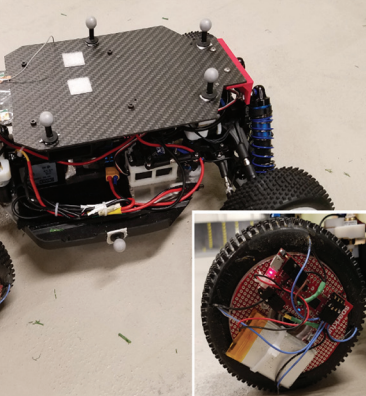
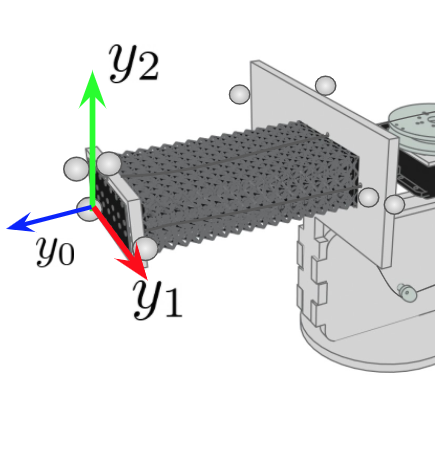
Terrain Sensitive Tire
Project
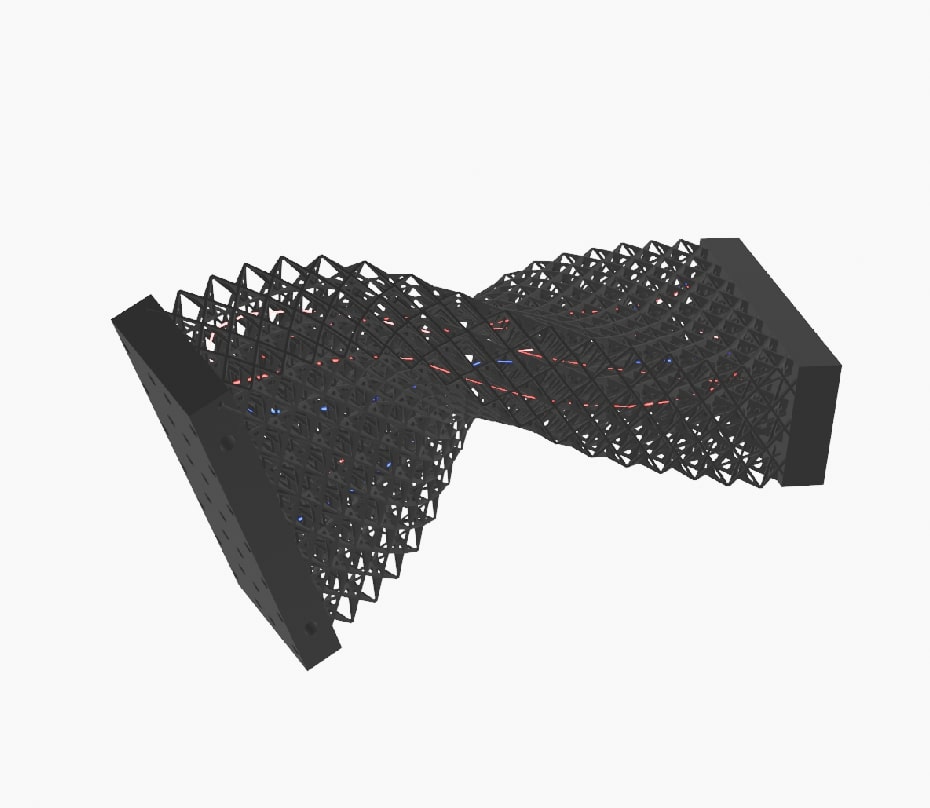
High-bandwidth Control
Project
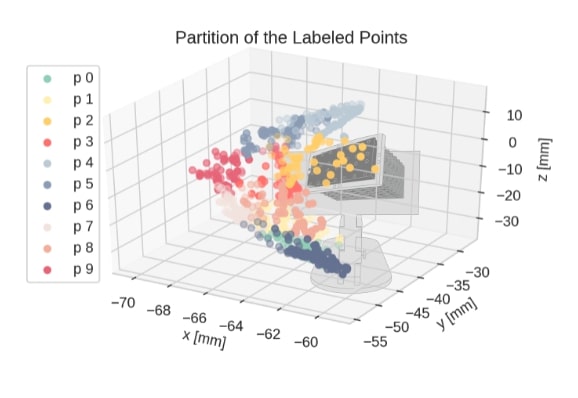
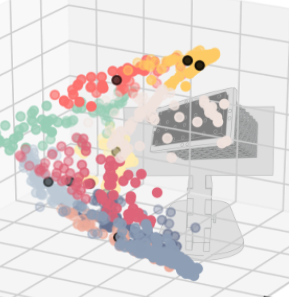
Online Prediction
Project